Задача 1: Линеаризованное уравнение на магнитный момент#
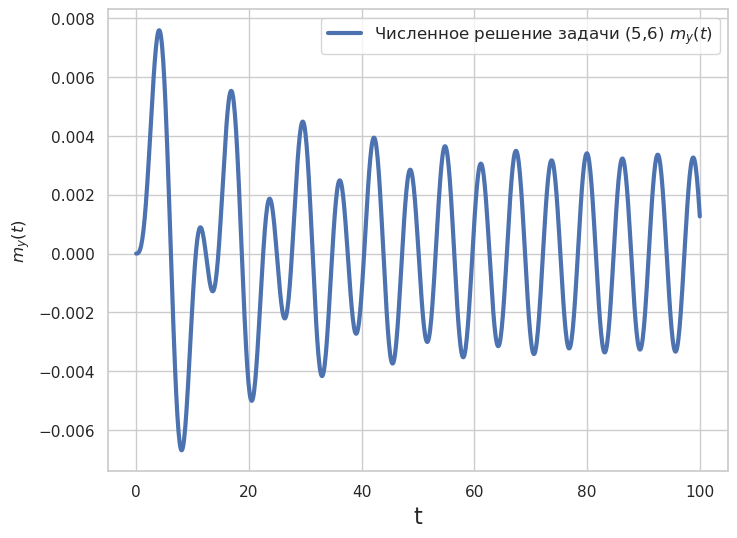
Рассмотрим частный случай, когда уравнение на магнитный момент Ландау–Лифшица–Гильберта может быть сведено к решению уравнения на одну компоненту \(m_y\) (линейный осциллятор).
\[
\begin{eqnarray}
\frac{d^2 m_y}{dt^2} + 2\alpha \omega_J \frac{d m_y}{dt} +\omega_F^2 m_y = \omega_F^2 G r \sin(\omega_J t)
\label{eq4}
\tag{4}
\end{eqnarray}
\]
с параметрами модели:
G - отношение энергии Джозефсона к энергии магнитной анизотропии;
r - константа спин-орбитального взаимодействия;
\(\alpha\) - диссипация Гилберта;
\(\omega_F\) - частота ферромагнитного резонанса.
Для проведения исследования динамики перейдем от одного дифференциального уравнения второго порядка к системе двух уравнений и разрешим их относительно производных, полагая \( m_y = y_1\):
\[\begin{split}
\begin{eqnarray}
\begin{cases}
\frac{d y_1}{dt} = y_2, \\
\frac{d y_2}{dt} = - 2\alpha \omega_J y_2 -\omega_F^2 y_1 + \omega_F^2 G r \sin(\omega_J t).
\end{cases}
\label{eq5}
\tag{5}
\end{eqnarray}
\end{split}\]
Начальные условия:
\[
\begin{eqnarray}
y_1(0)=0.1, y_2(0)=0.
\tag{6}
\end{eqnarray}
\]
import numpy as np
import matplotlib.pyplot as plt
from functools import partial
from scipy.integrate import solve_ivp
import seaborn as sns
sns.set()
sns.set(style="whitegrid")
Опредляем значения параметров модели и численного решения
# Параметры модели
G = 0.1
r = 0.1
omegaF = 0.5
alpha = 0.1
omegaJ = 1
# Параметры численного счета
t0 = 0
tf = 100
nt = 1000
# Массив точек (сетка) в которых будет находится решение
t_e = np.linspace(t0, tf, nt)
# Начальное условие
y0 = np.array([0.01, 0])
def my_t(t, S, G, r, alpha, omegaF, omegaJ):
''' Определяет правые части ДУ Задачи 1.
G, r, alpha, omegaF,omegaJ - параметры модели
S=[y1, y2] - вектор-фунция'''
y1 = S[0]
y2 = S[1]
dy1 = y2
dy2 = -2*alpha*omegaF*y2 - omegaF*omegaF*y1 + \
omegaF*omegaF*G*r*np.sin(omegaJ*t)
dS = [dy1, dy2]
return dS
s = np.array([0.1, 0])
dS = my_t(0, s, 0.1, 0.1, 0.1, 0.5, 1)
dS
[0.0, -0.025]
f = partial(my_t, G=G, r=r, alpha=alpha,
omegaF=omegaF, omegaJ=omegaJ)
t_e = np.linspace(t0, tf, nt)
s0 = np.array([0.0, 0])
sol_lin = solve_ivp(f, [t0, tf], s0, t_eval=t_e, method='RK45')
plt.figure(figsize=(8, 6))
plt.plot(sol_lin.t, sol_lin.y[0],
label='Численное решение задачи (5,6) $m_y(t)$', linewidth=3.0)
plt.xlabel('t', size=16)
plt.ylabel('$m_y(t)$', size=12)
plt.legend(fontsize=12)
plt.show()